- 选择排序(C)
- 插入排序(C)
- 冒泡排序(C)
- 希尔排序(C)
- 快速排序(C)
- 归并排序(C)
- 堆排序(C)
- 计数排序(C)
- 二分查找法(C)
- 前序遍历二叉树
- 中序遍历二叉树
- 后序遍历二叉树
- 层序遍历二叉树(C)
- 判断二叉树是否相等(C)
- 求二叉树的叶子节点数(C)
- 求二叉树的深度(C)
- 求最大的子序 列和的联机算法(C)
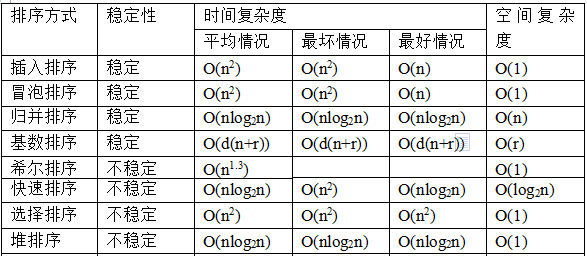
- 分析排序算法时间空间复杂度和各自的稳定性
- 写内存拷贝
- 图的广度优先遍历(C)
- 图的深度优先遍历(C)
- 图的邻接矩阵存储结构形式说明(C)
- 图的邻接表的形式说明及其建表算法(C)
- 排序相关问题
- 说明链表和数组作为数据的不同组织形式,各自的优缺点
- 链表反转(C)
- 红黑树定义
选择排序(C)
首先找到最小元素置于起始位置,再从剩余元素中继续寻找最小者放到已排序序列末尾,依次类推(不稳定排序)
void SelectionSort(int arr[],int len){
int i,j,min,tmp;
for(i = 0; i < len; i++){
min = i;
for(j = i; j < len; j++){
if(arr[j] < arr[min]){
min = j;
}
}
tmp = arr[i];
arr[i] = arr[min];
arr[min] = tmp;
}
}
插入排序(C)
对于未排序数据在已排序序列中从后向前扫描,找到相应位置并插入(稳定排序)
void InsertionSort(int arr[],int len){
int i,j,tmp;
for(i = 1; i < len; i++){
tmp = arr[i];
for(j = i; j>0 && arr[j-1]>tmp; j--){
arr[j] = arr[j-1];
arr[j-1] = tmp;
}
}
}
冒泡排序(C)
(稳定排序)
void BubbleSort(int arr[],int len){
int i,j,tmp;
for(i = 0; i < len; i++){
for(j = i+1; j < len; j++){
if(arr[j] < arr[i]){
tmp = arr[j];
arr[j] = arr[i];
arr[i] =tmp;
}
}
}
}
希尔排序(C)
插入排序的变种。
先取一个正整数d1 < N,把所有相隔d1的元素放一组,共d1组,组内进行直接插入排序,再取d2 < d1,重复上述步骤,直至d=1.只要最终步长为1,任何步长序列都可以,当步长为1时,算法即为插入排序。(不稳定排序)
void ShellSort(int arr[],int len){
int i,j,incr,tmp;
// 14,7,3,1
for(incr = len/2; incr > 0; incr /= 2){
for(i = incr; i < len; i++){
tmp = arr[i];
for(j = i; j >= incr; j -= incr){
if(tmp < arr[j-incr]){
arr[j] = arr[j-incr];
}
else{
break;
}
}
arr[j] = tmp;
}
}
}
快速排序(C)
通过一趟排序将要排序的数据分割成独立的两部分,其中一部分的所有数据都比另外一部分的所有数据都要小,然后再按此方法对这两部分数据分别进行快速排序,整个排序过程可以递归进行,以此达到整个数据变成有序序列。 (不稳定排序)
void QuickSort(int a[],int low,int high){
int i = low;
int j = high;
int temp = a[i];
if( low < high){
while(i < j) // 若条件为i<=j,则将所有判定都加等号则会发生死循环
{
while((a[j] >= temp) && (i < j)){
j--;
}
a[i] = a[j];
while((a[i] <= temp) && (i < j)){
i++;
}
a[j]= a[i];
}
a[i] = temp;
QuickSort(a,low,i-1);
QuickSort(a,j+1,high);
}
}
第二种
void qsort(int v[], int left, int right){
int i,last;
void swap(int v[],int i,int j);
if(left >= right){
return ;
}
swap(v,left,(left + right)/2);
last = left;
for(i = left +1; i<= right; i++){
if(v[i] < v[left]){
swap(v, ++last,i);
}
}
swap(v, left, last);
qsort(v,left,last-1);
qsort(v,last+1,right);
}
void swap(int v[], int i, int j){
int temp;
temp = v[i];
v[i] = v[j];
v[j] = temp;
}
归并排序(C)
(稳定排序)
void Merge( int arr[], int tmpArray[], int lBegin, int rBegin, int rEnd )
{
int i, lEnd, len, tmpPos;
lEnd = rBegin - 1;
tmpPos = lBegin;
len = rEnd - lBegin + 1;
/* main loop */
while( lBegin <= lEnd && rBegin <= rEnd ){
if( arr[ lBegin ] <= arr[ rBegin ] ){
tmpArray[ tmpPos++ ] = arr[ lBegin++ ];
}
else{
tmpArray[ tmpPos++ ] = arr[ rBegin++ ];
}
}
while( lBegin <= lEnd ){
tmpArray[ tmpPos++ ] = arr[ lBegin++ ];
}
while( rBegin <= rEnd ){
tmpArray[ tmpPos++ ] = arr[ rBegin++ ];
}
for( i = 0; i < len; i++, rEnd-- ){
arr[ rEnd ] = tmpArray[ rEnd ];
}
}
void MSort( int arr[ ], int tmpArray[ ], int left, int right )
{
int mid;
if( left < right )
{
mid = ( left + right ) / 2;
MSort( arr, tmpArray, left, mid );
MSort( arr, tmpArray, mid + 1, right );
Merge( arr, tmpArray, left, mid + 1, right );
}
}
void MergeSort( int arr[ ], int len )
{
int *tmpArray;
tmpArray = malloc( len * sizeof( int ) );
if( tmpArray != NULL )
{
MSort( arr, tmpArray, 0, len - 1 );
free( tmpArray );
}
else
printf( "No space for tmp array!!!" );
}
堆排序(C)
(不稳定排序)
#define LeftChild(i) (2*(i) + 1)
//对数组A中以下标为i的元素作为根,大小为len的元素序列构成的堆进行堆调整,使该根节点放到合适的位置
void Sink(int arr[],int i,int len){
int child,tmp;
for(tmp = arr[i]; LeftChild(i)<len; i=child){
child = LeftChild(i);
if( child != len-1 && arr[child+1] > arr[child]){
child++;
}
if( tmp < arr[child] ){
arr[i] = arr[child];
}
else{
break;
}
}
arr[i] = tmp;
}
void HeapSort(int arr[],int len){
int i,tmp;
for( i = len/2; i >= 0; i-- ){ // BuildHeap从下往上建堆
Sink( arr, i, len );
}
// 取大根堆的根(即最大元素)放到数组末尾,同时缩减数组长度
for( i = len - 1; i > 0; i-- ){
/* DeleteMax */
tmp = arr[0];
arr[0] = arr[i];
arr[i] = tmp;
Sink( arr, 0, i );
}
}
计数排序(C)
(稳定排序)
void CountingSort(int arr[],int len){
int i, min, max;
min = max = arr[0];
// 找出范围
for(i = 1; i < len; i++) {
if (arr[i] < min)
min = arr[i];
else if (arr[i] > max)
max = arr[i];
}
int range = max - min + 1;
int *count = (int*)malloc(range * sizeof(int));
for(i = 0; i < range; i++){
count[i] = 0;
}
for(i = 0; i < len; i++){
count[ arr[i] - min ]++;
}
int j, z = 0;
for(i = min; i <= max; i++){
for(j = 0; j < count[ i - min ]; j++){
arr[z++] = i;
}
}
free(count);
}
二分查找法(C)
int HalfSearch(int arr[], int low, int high, int num){
int mid;
mid = (low+high) / 2;
if( (low>=high) && (arr[mid]!=num) ){
return -1;
}
else{
if( arr[mid]==num ){
return mid;
}
else if( arr[mid]>num ){
high = mid-1;
}
else{
low = mid+1;
}
return HalfSearch(arr,low,high,num);
}
}
前序遍历二叉树
遍历二叉树的算法中基本操作是访问结点,因此,无论是哪种次序的遍历,对有n个结点的二叉树,其时间复杂度均为O(n) 。
递归算法:
void PreorderTraverse(BTNode *T){
if( T!=NULL ){
visit(T->data) ; // 访问根结点
PreorderTraverse(T->Lchild) ;
PreorderTraverse(T->Rchild) ;
}
}
非递归算法: 设T是指向二叉树根结点的指针变量,非递归算法是: 若二叉树为空,则返回;否则,令p=T; ⑴ 访问p所指向的结点; ⑵ q=p->Rchild ,若q不为空,则q进栈; ⑶ p=p->Lchild ,若p不为空,转(1),否则转(4); ⑷ 退栈到p ,转(1),直到栈空为止。
#define MAX_NODE 50
void PreorderTraverse( BTNode *T){
BTNode *Stack[MAX_NODE] , *p=T, *q ;
int top=0 ;
if (T==NULL){
printf(“ Binary Tree is Empty!\n”) ;
}
else {
do{
visit( p-> data ) ;
q=p->Rchild ;
if ( q!=NULL ){
Stack[++top]=q ;
}
p=p->Lchild ;
if (p==NULL){
p=Stack[top--] ;
}
}
while (p!=NULL) ;
}
}
中序遍历二叉树
递归算法
void InorderTraverse(BTNode *T){
if (T!=NULL){
InorderTraverse(T->Lchild) ;
visit(T->data) ; // 访问根结点
InorderTraverse(T->Rchild) ;
}
}
中序遍历二叉树(非递归算法) 设T是指向二叉树根结点的指针变量,非递归算法是: 若二叉树为空,则返回;否则,令p=T ⑴ 若p不为空,p进栈, p=p->Lchild ;否则(即p为空),退栈到p,访问p所指向的结点; ⑵ p=p->Rchild ,转(1); 直到栈空为止。
#define MAX_NODE 50
void InorderTraverse( BTNode *T){
BTNode *Stack[MAX_NODE] ,*p=T ;
int top=0 , bool=1 ;
if (T==NULL){
printf(“ Binary Tree is Empty!\n”) ;
}
else{
do{
while (p!=NULL){
stack[++top]=p ;
p=p->Lchild ;
}
if (top==0){
bool=0 ;
}
else{
p=stack[top--] ;
visit( p->data ) ;
p=p->Rchild ;
}
} while (bool!=0) ;
}
}
后序遍历二叉树
递归算法
void PostorderTraverse(BTNode *T){
if (T!=NULL) {
PostorderTraverse(T->Lchild) ;
PostorderTraverse(T->Rchild) ;
visit(T->data) ; // 访问根结点
}
}
设T是指向根结点的指针变量,后序遍历二叉树的非递归算法是: 若二叉树为空,则返回;否则,令p=T; ⑴ 第一次经过根结点p,不访问: p进栈S1 , tag 赋值0,进栈S2,p=p->Lchild 。 ⑵ 若p不为空,转(1),否则,取状态标志值tag; ⑶ 若tag=0:对栈S1,不访问,不出栈;修改S2栈顶元素值(tag赋值1) ,取S1栈顶元素的右子树,即p=S1[top]->Rchild ,转(1); ⑷ 若tag=1:S1退栈,访问该结点; 直到栈空为止。
层序遍历二叉树(C)
#define MAX_NODE 50
void LevelorderTraverse( BTNode *T){
BTNode *Queue[MAX_NODE] ,*p=T ;
int front=0 , rear=0 ;
if (p!=NULL){
Queue[++rear]=p; // 根结点入队
// 当队列不为空时
while (front < rear){
p = Queue[++front];
visit( p->data );
if (p->Lchild!=NULL){
Queue[++rear]=p; // 左结点入队
}
if (p->Rchild!=NULL){
Queue[++rear]=p; // 右结点入队
}
}
}
}
判断二叉树是否相等(C)
typedef struct _TreeNode{
char c;
TreeNode *leftchild;
TreeNode *rightchild;
}TreeNode;
// A、B两棵树相等当且仅当RootA->c==RootB-->c,而且A和B的左右子树相等或者左右互换相等。
int CompTree(TreeNode* tree1,TreeNode* tree2){
if( tree1==NULL && tree2 == NULL ){
Return 0;
}
if( tree1 == NULL || tree2 == NULL ){
return 1;
}
if( tree1->c != tree2->c){
return 1;
}
if( CompTree(tree1->leftchild, tree2->leftchild) == 0 && CompTree(tree1->rightchild, tree2->rightchild) == 0 ){
return 0;
}
if( CompTree(tree1->leftchild, tree2->rightchild) == 0 && CompTree(tree1->rightchild, tree2->leftchild) == 0 ){
return 0;
}
}
由于需要比较的状态是两棵树的任意状态,而二叉树上的每一个节点的左右子节点都可以交换,因此一共需要对比2^n种状态。算法复杂度是O(2^n)
求二叉树的叶子节点数(C)
#define MAX_NODE 50
int search_leaves( BTNode *T){
BTNode *Stack[MAX_NODE] ,*p=T;
int top=0, num=0;
if(T!=NULL){
stack[++top]=p ;
while( top > 0 ){
p = stack[top--] ;
if( p->Lchild==NULL && p->Rchild==NULL ){
num++ ;
}
if( p->Rchild != NULL ){
stack[++top]=p->Rchild;
}
if(p->Lchild != NULL ){
stack[++top]=p->Lchild;
}
}
}
return(num) ;
}
求二叉树的深度(C)
#define MAX_NODE 50
int search_depth( BTNode *T){
BTNode *Stack[MAX_NODE] ,*p=T;
int front=0 , rear=0, depth=0, level ;
// level总是指向访问层的最后一个结点在队列的位置
if (T!=NULL){
Queue[++rear]=p; // 根结点入队
level=rear ; // 根是第1层的最后一个节点
while (front < rear){
p=Queue[++front];
if (p->Lchild != NULL){
Queue[++rear]=p; // 左结点入队
}
if (p->Rchild!=NULL){
Queue[++rear]=p; // 右结点入队
}
if (front == level){
// 正访问的是当前层的最后一个结点
depth++ ;
level=rear ;
}
}
}
}
求最大的子序 列和的联机算法(C)
int MaxSubSequenceSum(const int arr[],int len){
int tmpSum, maxSum, j;
tmpSum = maxSum = 0;
for( j=0; j<len; j++ ){
tmpSum += arr[j];
if(tmpSum > maxSum){
maxSum = tmpSum;
}
else if(tmpSum < 0){
tmpSum = 0;
}
}
return maxSum;
}
分析排序算法时间空间复杂度和各自的稳定性
写内存拷贝
void * memcpy (void * dst, const void * src, size_t count){
void * ret = dst;
while (count--) {
*(char *)dst = *(char *)src;
dst = (char *)dst + 1;
src = (char *)src + 1;
}
return(ret);
}
图的广度优先遍历(C)
(1)邻接表表示图的广度优先搜索算法
// 以vk为源点对用邻接表表示的图G进行广度优先搜索
void BFS(ALGraph*G,int k){
int i;
CirQueue Q; //须将队列定义中DataType改为int
EdgeNode *p;
InitQueue(&Q); //队列初始化
printf("visit vertex:%e",G->adjlist[k].vertex); //访问源点vk
visited[k]=TRUE;
EnQueue(&Q,k); //vk已访问,将其人队。(实际上是将其序号人队)
while(!QueueEmpty(&Q)){ //队非空则执行
i=DeQueue(&Q); //相当于vi出队
p=G->adjlist[i].firstedge; //取vi的边表头指针
while(p){ //依次搜索vi的邻接点vj(令p->adjvex=j)
if(!visited[p->adivex]){ //若vj未访问过
printf("visitvertex:%c",C->adjlistlp->adjvex].vertex); //访问vj
visited[p->adjvex]=TRUE;
EnQueue(&Q,p->adjvex);//访问过的vj人队
}//endif
p=p->next; //找vi的下一邻接点
}//endwhile
}//endwhile
}//end of BFS
(2)邻接矩阵表示的图的广度优先搜索算法
// 以vk为源点对用邻接矩阵表示的图G进行广度优先搜索
void BFSM(MGraph *G,int k){
int i,j;
CirQueue Q;
InitQueue(&Q);
printf("visit vertex:%c",G->vexs[k]); //访问源点vk
visited[k]=TRUE;
EnQueue(&Q,k);
while(!QueueEmpty(&Q)){
i=DeQueue(&Q); //vi出队
//依次搜索vi的邻接点vj
for(j=0;j<G->n;j++){
if(G->edges[i][j]==1&&!visited[j]){ //vi未访问
printf("visit vertex:%c",G->vexs[j]);//访问vi
visited[j]=TRUE;
EnQueue(&Q,j);//访问过的vi人队
}
}
}//endwhile
}//BFSM
对于具有n个顶点和e条边的无向图或有向图,每个顶点均入队一次。广度优先遍历(BFSTraverse)图的时间复杂度和DFSTraverse算法相同。 当图是连通图时,BFSTraverse算法只需调用一次BFS或BFSM即可完成遍历操作,此时BFS和BFSM的时间复杂度分别为O(n+e)和0(n2)。
图的深度优先遍历(C)
(1)深度优先遍历算法
typedef enum{FALSE,TRUE} Boolean; // FALSE为0,TRUE为1
Boolean visited[MaxVertexNum]; // 访问标志向量是全局量
// 深度优先遍历以邻接表表示的图G,而以邻接矩阵表示G时,算法完全与此相同
void DFSTraverse(ALGraph *G){
int i;
for(i=0;i<G->n;i++){
visited[i]=FALSE; //标志向量初始化
}
for(i=0; i<G->n; i++){
if(!visited[i]){ //vi未访问过
DFS(G,i); //以vi为源点开始DFS搜索
}
}
}
(2)邻接表表示的深度优先搜索算法
void DFS(ALGraph *G,int i){
// 以vi为出发点对邻接表表示的图G进行深度优先搜索
EdgeNode *p;
printf("visit vertex:%c",G->adjlist[i].vertex); //访问顶点vi
visited[i]=TRUE; //标记vi已访问
p=G->adjlist[i].firstedge; // 取vi边表的头指针
while(p){ //依次搜索vi的邻接点vj,这里j=p->adjvex
if (!visited[p->adjvex]){// 若vi尚未被访问
DFS(G,p->adjvex);//则以Vj为出发点向纵深搜索
}
p=p->next; // 找vi的下一邻接点
}
}
(3)邻接矩阵表示的深度优先搜索算法
void DFSM(MGraph *G,int i){
// 以vi为出发点对邻接矩阵表示的图G进行DFS搜索,设邻接矩阵是0,l矩阵
int j;
printf("visit vertex:%c",G->vexs[i]); //访问顶点vi
visited[i]=TRUE;
for(j=0;j<G->n;j++){ //依次搜索vi的邻接点
if(G->edges[i][j]==1&&!visited[j]){
DFSM(G,j)//(vi,vj)∈E,且vj未访问过,故vj为新出发点
}
}
}
对于具有n个顶点和e条边的无向图或有向图,遍历算法DFSTraverse对图中每顶点至多调用一次DFS或DFSM。从DFSTraverse中调用DFS(或DFSM)及DFS(或DFSM)内部递归调用自己的总次数为n。 当访问某顶点vi时,DFS(或DFSM)的时间主要耗费在从该顶点出发搜索它的所有邻接点上。用邻接矩阵表示图时,其搜索时间为O(n);用邻接表表示图时,需搜索第i个边表上的所有结点。因此,对所有n个顶点访问,在邻接矩阵上共需检查n2个矩阵元素,在邻接表上需将边表中所有O(e)个结点检查一遍。 所以,DFSTraverse的时间复杂度为O(n2) (调用DFSM)或0(n+e)(调用DFS)。
图的邻接矩阵存储结构形式说明(C)
#define MaxVertexNum l00
typedef struct{
char vexs[MaxVertexNum]; // 顶点表
int edges[MaxVertexNum][MaxVertexNum]; // 邻接矩阵,可看作边表
int n,e; // 图中当前的顶点数和边数
}MGragh;
图的邻接表的形式说明及其建表算法(C)
对图的每个顶点建立一个单链表(n个顶点建立n个单链表),第i个单链表中的结点包含顶点Vi的所有邻接顶点。又称链接表。 (1)邻接表的形式说明
// 边表结点
typedef struct node{
int adjvex; // 邻接点域
struct node *next; // 链域
// 若要表示边上的权,则应增加一个数据域
}EdgeNode;
// 顶点表结点
typedef struct vnode{
int vertex; // 顶点域
EdgeNode *firstedge; // 边表头指针
}VertexNode;
typedef VertexNode AdjList[MaxVertexNum]; //AdjList是邻接表类型
(2)建立无向图的邻接表算法
// 建立无向图的邻接表表示
void CreateALGraPh(ALGrahp *G){
int i,j,k;
EdgeNode *s;
scanf("%d%d",&G->n,&G->e); // 读入顶点数和边数
for(i=0;i<G->n;i++){
//建立顶点表
G->adjlist[i].vertex=getchar(); //读入顶点信息
G->adjlist[i].firstedge=NULL;//边表置为空表
}
for(k=0; k<G->e; k++){
//建立边表
scanf("%d%d",&i,&j);否则读入边(vi,vj)的顶点对序号
s=(EdgeNode *)malloc(sizeof(EdgeNode)); //生成边表结点
s->adjvex=j; //邻接点序号为j
s->next=G->adjlist[i].firstedge;
G->adjlist[i].firstedge=s; //将新结点*s插入顶点vi的边表头部
s=(EdgeNode *)malloc(sizeof(EdgeNode));
s->adjvex=i; //邻接点序号为i
s->next=G->adjlist[j].firstedge;
G->adjlistk[j].firstedge=s; //将新结点*s插入顶点vj的边表头部
}//end for
}CreateALGraph
排序相关问题
1.基于比较的排序,其复杂度最佳是多少? 2.快排排序、归并排序,其复杂度是多少? 3.既然快排O(n^2) > O(nlogn), 为什么实际应用中,快排的表现经常优于归并排序? 4.存在O(n)级别的排序算法么? 答案: 1.O(nlogn) 2.快排O(n^2),归并排序O(nlogn) 3.inplace、cache性能好 4.存在,非比较排序。如counting sort, radix sort。 (最基础的问题,必须正确。)
说明链表和数组作为数据的不同组织形式,各自的优缺点
数组,在内存上给出了连续的空间。链表,内存地址上可以是不连续的,每个链表的节点包括原来的内存和下一个节点的信息(单向的一个,双向链表的话,会有两个)。
数组优于链表的 1.内存空间占用的少,因为链表节点会附加上一块或两块下一个节点的信息。但是数组在建立时就固定了。所以也有可能会因为建立的数组过大或不足引起内存上的问题。 2.数组内的数据可随机访问,但链表不具备随机访问性。这个很容易理解,数组在内存里是连续的空间,比如如果一个数组地址从100到200,且每个元素占用两个字节,那么100-200之间的任何一个偶数都是数组元素的地址,可以直接访问。链表在内存地址可能是分散的。所以必须通过上一节点中的信息找能找到下一个节点。 3.查找速度。
链表优于数组的 1.插入与删除的操作。如果数组的中间插入一个元素,那么这个元素后的所有元素的内存地址都要往后移动。删除的话同理。只有对数据的最后一个元素进行插入删除操作时,才比较快。链表只需要更改有必要更改的节点内的节点信息就够了。并不需要更改节点的内存地址。
2.内存地址的利用率方面。不管你内存里还有多少空间,如果没办法一次性给出数组所需的要空间,那就会提示内存不足,磁盘空间整理的原因之一在这里。而链表可以是分散的空间地址。
3.链表的扩展性比数组好。因为一个数组建立后所占用的空间大小就是固定的,如果满了就没法扩展,只能新建一个更大空间的数组;而链表不是固定的,可以很方便的扩展。
链表反转(C)
struct Item{
char c;
Item *next;
};
Item *Reverse( Item *x ){
Item *prev = NULL,*curr = x;
while ( curr ){
Item *next = curr->next;
curr->next = prev;
prev = curr;
curr = next;
}
return prev;
}
int main(){
Item *x,
d = {"d", Null},
c = {"c", &d},
b = {"b", &c},
a = {"a", &b};
x = Reverse( &a );
}